Eteläisen sotilaspiirin innovaatiopäivä: robottikompleksi "Platform-M. "Platform-M": Robottikompleksi, jolla on laajat ominaisuudet
Olen ylpeä voidessani esitellä sinulle uuden robottini - RedBoardin. Tämä robottitaso liikkuu kaikkiin suuntiin ja pystyy liikuttamaan myös kynsiä. Toivottavasti pidät tästä robotista ja löydät tästä artikkelista jotain uutta ja mielenkiintoista itsellesi... Siellä on kaavio laitteesta, mahdollinen painetun tai mallilevyn piiri projektia varten sekä laitteen laiteohjelmisto. Arduino-ohjain, sen yhteys Android-laite Bluetooth-viestintäkanavan kautta ja sitä seuraava tietojenkäsittelyalgoritmi, moottorin ohjausohjelma.
Ennen kuin aloitat projektin kehittämisen, sinun on ensin luotava siitä luonnos esimerkiksi paperille. Jatka tämän teeman kehittämistä, kunnes on selvää, että robotti toimii täydellisesti ja ettei ole epäilystäkään, että se voi epäonnistua. Aloittaessani RedBoardin kehittämistä ajattelin, että miksi en tekisi minulle pienen alustan, joka nostaa joitain asioita ja sitten jatkossa ajelee talossani, tietysti automaattisesti, ja kastelee kukkia pumpulla (vesipumpulla). Silloin vältettäisiin Android-älypuhelimen käyttöä ja tarvetta, mikä periaatteessa ei ole huono. Joten syntyi idea Arduino-ohjaimen ohjaamasta RedBoard-alustasta. Siirrytään laitteen valokuvaan.
Tämän robotin kokoamiseksi tarvitsemme:
- Puinen palikka;
- Moottoreiden kiinnikkeet ja muut osat;
- 3 servomoottoria manipulaattorille ja kynsille;
- 2 moottoria tai 2 samaa servoa (mutta ne on muokattava vakiopyörimisservoiksi);
- Lisätä. osat osien liittämiseen (pultit, aluslevyt jne.);
- 4 pyörää;
- Maali (niille, jotka sitä tarvitsevat);
- Jäljelle jäävät robotin komponentit, esim. mikrosirut, johdot ja paljon muuta kuvataan Elektroniikka-osiossa.
Siirrytään nyt kokoonpanoon. Otamme puupalkan ja maalaamme tarvittaessa. Poraamme reiän servolle tangon yläosaan. Yritä vähitellen työntää servomoottori reikään samalla kun suojaat ohjausjohtoa. Lisäksi, kun servo on ruuvattu tankoon, voit aloittaa manipulaattorin rakentamisen. Aseta sitten pyörät tangon alle käyttämällä niiden kiinnikkeitä. Hienoa, kokoonpano on valmis, nyt siirrytään bot-piiriin ja elektronisten komponenttien asennukseen.


Kolme ulkoista tehoa saavaa servoa on kytketty Atmega 328 -mikrokontrolleriin ja 4 lähtöä l293d-moottoriohjaimesta. Seuraavaksi hc-06 liitetään ohjaimeen seuraavasti:
Arduino nastat HC-06
RX TX
TX RX
VCC VCC
GND GND
Arduino-ohjaimen vilkkuminen on helppoa.

- Lataa Arduino IDE osoitteesta www.arduino.cc;
- Noudata asennusohjeita ja suorita sitten ohjelma;
- Lataa tai kirjoita Arduino-mikrokontrollerimme ohjelma / luonnos / laiteohjelmisto (linkki alla olevaan ohjelmalähteeseen);
- Päivitämme sen, lataamme sen valitsemalla Palvelu-välilehdeltä Uno-kortin, jos sinulla on sellainen, ja sitten Serial COM -portti on se, johon liitit johdon Arduinosta, ja voit selvittää, minkä com-portin voit Etsi tehtävänhallinnasta kohdasta Oma tietokone - Järjestelmän ominaisuudet - Tehtävienhallinta. Levy näkyy COM-portit-välilehdessä.
- Lataamisen jälkeen irrota kaapeli tietokoneesta ja liitä akku robotin verkkoon.
- Ja kaikki on...

Vedämme mikro-ohjaimen ulos Arduino Uno -levyltä, jos mahdollista, ja yhdistämme sitten nastat seuraavasti:
Arduino = Atmega328
Rx = Tx
Tx = Rx
VCC = VCC
GND = GND
RESET = RESET
Ja silti, tietysti, yhdistämme 16 MHz kvartsiresonaattorin Atmega328-ohjaimeen.
RedBoardia ohjaa viime kädessä Android-puhelin. Siinä on Bluetooth spp tools pro asennettuna. Tämä ohjelma voidaan ladata ilmaiseksi Google Playsta... Ohjelmalla on erittäin helppokäyttöinen käyttöliittymä. Ensin etsit HC06:ta ja siirryt sitten näppäimistötilaan, mikä tarkoittaa, että painamme joitain painikkeita ja mikro-ohjainkortin pitäisi ottaa joitain arvoja. Nämä arvot määritetään itse ohjelmassa, jos napsautat asetuksista Painikesarja. Nämä arvot ovat jo kirjoittamassani robottiohjelmassa.
Luettelo radioelementeistä
| Nimitys | Tyyppi | Nimitys | Määrä | Merkintä | Pisteet | Oma muistilehtiö |
|---|---|---|---|---|---|---|
| U1 | MK AVR 8-bittinen | ATmega328P | 1 | Muistilehtiöön | ||
| U2 | Sähkömoottorin kuljettaja | L293 | 1 | Muistilehtiöön | ||
| Lineaarinen säädin | LM7805 | 1 | Muistilehtiöön | |||
| X1 | Kvartsi resonaattori | 1 | Muistilehtiöön | |||
| Tact-painike | 1 |
Yhteistyörobotti (cobot), jota käytetään kognitiivisten järjestelmien testausalustana useissa tutkimusprojekteissa.
, RoboticCub Project, Eurooppa
Antropomorfinen alusta tekoälyn ja kognitiivisten kykyjen kehittämiseen. iCub on lyhenne sanoista keinotekoinen kognitiivinen keho.
Magni, Ubiquity Robotics
Ubiquity Roboticsin Magni-alusta kahdella suurella pyörällä voi siirtää jopa 100 kg:n hyötykuorman, jonka avulla voit luoda sen pohjalta monenlaisia robotteja. Magnia ohjaa kaksi sähkömoottoria, joiden kummankin teho on 200 W ja jotka pystyvät kiihdyttämään sen nopeuteen 2 m / s vaakatasossa. Energia: 7A +5V ja 7A +12V tasavirta. Tietokonealusta - Raspberry Pi3 (neliydin), ohjelmisto - ROS Kinetic / Ubuntu 16.04. Yksi digikamera eteenpäin. Kymmenen ampeerin akku tarjoaa 8 tunnin käyttöajan ilman latausta. Tarvittaessa voit laittaa lyijyakun, jonka kapasiteetti on jopa 32 A, mikä pidentää akun käyttöikää jopa vuorokaudessa. Alusta voidaan valinnaisesti varustaa 3D-sensorilla, jonka näkökenttä on 120 astetta.
2018.03.16 .
, Aldebaran Robotics, Ranska (osti SoftBank Group, Japani)
Antropomorfinen kävelevä kaksijalkainen robotti, jota voidaan käyttää tutkimusalustana, sillä siihen voi ladata omia ohjelmistoja.
PR2, Willow Garage
Android-tyyppinen alusta kahdella käden manipulaattorilla, Willow Garagen kehittämä. Arvioitu hinta on noin 400 dollaria. On versio, jossa on yksi manipulaattori, jonka arvo on 285 000 dollaria. Hinnat - kesällä 2016.
Eräs vaihtoehdoista Arduinoon ja muihin tietokonelevyihin perustuvien robottien luomiseen on käyttää valmiita koteloita ja kehittää omia täytteitä. Markkinoilta löytyy riittävä määrä sellaisia kehyksiä, jotka sisältävät myös mekaanisen alustan (pyörät, telat, saranat jne.). Kun olet ottanut valmiin rungon, voit keskittyä kokonaan robotin ohjelmointiin. Tarjoamme pienen yleiskatsauksen tällaisista luurankoroboteista.
Miksi robotin runkoja ja luurankoja tarvitaan?
Robotin luominen on monivaiheinen prosessi, joka sisältää suunnittelun, kokoonpanon ja ohjelmoinnin. Robotiikan tuntemus rajoittuu fysiikkaan, mekaniikkaan ja algoritmisointiin. Pyrkivät nuoret robotikot hakeutuvat eri tavalla kohti robotin luomisen jokaista vaihetta. Joidenkin mielestä robotin mekaanisten osien luominen on helpompaa, mutta ohjelmointi on vaikeaa. Joku päinvastoin ohjelmoi helposti robotin käyttäytymisen logiikan, mutta mekaanisen mallin luominen on vaikeaa.
Niiden, joille mekaniikan suunnittelu on vaikeaa ja jotka ovat kiinnostuneempia eri antureiden valintaprosessista ja robottilogiikan suunnittelusta, kannattaa kiinnittää huomiota erilaisiin mekaanisiin perusteisiin robottien rakentamisessa. Niitä myydään ilman elektroniikkaa, itse asiassa tämä on tulevan robotin runko tai luuranko. Jää vain lisätä heille "aivot" (esimerkiksi maksu Arduino), hermoja ja lihaksia (anturit ja toimilaitteet) ja herättää ne henkiin (ohjelma). Joskus tällaiset tapaukset sisältävät jopa moottoreita tai antureita.
Alustat 4 pyörällä - Arduino-koneen perusta
Pyörillä oleva alusta on ylivoimaisesti yksinkertaisin ja tehokkain alusta robotin rakentamiseen. Myynnissä on monia erilaisia tämän tyyppisiä aihioita. Jotkut heistä:
Alusta robotin luomiseen Arduinossa, valmistettu alumiiniseoksesta. Alusta on varustettu 4 pyörällä, joista jokainen on kytketty erilliseen moottoriin. Moottorit sisältyvät hintaan. Alustaa voidaan käyttää auton tai minkä tahansa muun ajorobotin alustana. Alustan koko on noin 20 x 20 cm. Mukana myös ruuvit, mutterit ja johdot moottoreiden kytkemiseen.
Tällaisen alustan tulevalle robottillesi voit ostaa noin 75 dollarilla DX.com-verkkokaupasta.
Toinen nelipyöräinen alusta Arduino-pohjaisen robotin luomiseen herättää huomiota pyörillään. Niiden halkaisija on 80 mm, leveys 60 mm, ne näyttävät tyylikkäiltä ja luotettavilta. Tässä alustassa on 1,5 mm paksu akryylipohja. Runko on vakaa ja soveltuu nopeasti liikkuvan robotin rakentamiseen. aliexpress myy tämän luurankorobotin 60 dollarilla. Sarja on samanlainen kuin edellinen - pyörät, moottorit, johdot ja ruuvit ovat jo sarjassa.

Kaksi- ja kolmipyöräinen alusta kävelyrobottien rakentamiseen
Seuraava kolmipyöräinen alusta Arduino-pohjaisen robotin luomiseen moottorit on kytketty vain kahteen pyörään, mikä vähentää kustannuksia. DX.com-verkkokaupassa tällaista alustaa myydään 20,5 dollarilla. Pohja on valmistettu kirkkaasta akryylistä. Sisältää 2 moottoria, ruuvit, mutterit, johdot, akkupaketti 4 AA-paristolle. Mitat noin 20 x 10 cm.

Kolmipyöräinen alusta Arduino-robotille. Kuva dx.com

Kaksipyöräinen alusta robotille. Kuva dx.com
Tela-alustainen tankkien runko Arduinossa
Tela-alustainen alusta vakaampia kuin pyörillä olevat. Lisäksi tässä mallissa vain kaksi moottoria riittää saattamaan järjestelmän liikkeelle, mikä tarkoittaa, että hinta on alhaisempi kuin nelipyöräisten alustojen. Yleisin malli teloilla on tietysti tankki, mutta tällaisesta pohjasta voi tulla alusta minkä tahansa muotoiselle robotille.
Caterpillar-runko robottisäiliön luomiseenperustuu Arduinoon. Sisältää 2 moottoria, telaketjun, ruuvit, mutterit. Tämän rungon mitat ovat 18,7 cm x 11,5 cm x 4,3 cm DX.com-verkkokaupassa tämä tela-alusta maksaa 42 dollaria.

Caterpillar-alusta robotille. Kuva dx.com
Arduino Spider Robot -kotelo
Hämähäkki- melko suosittu robottimuoto, joten myös sellaisia luurankokoteloita on myynnissä.. Hämähäkin muotoilu, toisin kuin pyörillä varustetut robotit, mahdollistaa liikkeen mihin tahansa suuntaan.
Ensimmäinen hämähäkki ja arvostelussamme maksaa noin 100 dollaria Aliexpressissä.

Kotelo hämähäkkirobotille. Kuva: aliexpress.com
Tämän kotelon mukana ei tule elektroniikkaa, servoja, ne on ostettava erikseen. On suositeltavaa käyttää MG 995 Servo -servoa tämän hämähäkkimallin kanssa. On hauskaa, että tällainen asema Aliexpress-verkkosivustolla voidaan ostaa sekä 33 dollarilla että 5 dollarilla (vaikka tässä tapauksessa sinun on ostettava 10 kappaletta). Vetovoimaa tarvitaan jokaisen tassun alla.
Lisäksi hallita Suuri määrä servot vaativat monikanavaisen servoohjaimen. Hämähäkin kokonaiskustannukset voivat olla melko korkeat.
Toinen kuusijalkainen luuranko hämähäkkirobotti tai jopa torakkarobotti kiinnitti huomioni 42,5 dollarin hintalapullaan. Kuudella metallitassulla olevan robotin pitäisi osoittautua vakaaksi, vaikkakaan ei kovin ohjattavaksi. Tämän torakan luuranko on 24 cm pitkä, 18 cm leveä ja 12 cm korkea. Voit ostaa tämän mustan robottitorakan Aliexpressin verkkosivuilta.

Asunto torakkarobotille. Kuva: aliexpress.com
Humanoidi robottikehykset
Malli vaikuttaa riittävän mielenkiintoiselta humanoidi robotti maksaa noin 105 dollaria. Täällä ei myöskään ole elektroniikkaa, mutta luovuudelle on paljon tilaa. Humanoidirobotin luominen ja ihmisen kävelyn ohjelmointi ei ole helppo ja mielenkiintoinen tehtävä. Voit alkaa kokeilla käsiäsi humanoidirobotin luomisessa itse ostamalla tällaisen luurangon Aliexpress-verkkokaupan verkkosivuilta. Jos uskot valmistajan kuvausta, niin tämän karskan perusteella voit tehdä jopa tanssivan robotin.

Kuori humanoidirobotille. Kuva: aliexpress.com
Valmis robotti, valmis kotelo vai Arduino-robotin luominen tyhjästä?
Valmiit täydelliset robotit perustuu Arduino-levyynsopii niille, jotka eivät ole erityisen kiinnostuneita sähköpiireistä. Ostamalla toimivan robottimallin, ts. itse asiassa valmis korkean teknologian lelu, voit herättää kiinnostuksen itsesuunnitteluun ja robotiikkaan. Arduino-alustan avoimuus sallii saman osat tehdä uusia leluja. Tällaisten robottien hinta vaihtelee noin 100 dollaria, mikä on yleensä suhteellisen pieni.
Valmiit rungot, joita tarkastelimme tässä katsauksessa, tarjoavat enemmän mielikuvitusta ja laajempaa valikoimaa robotteja. Et rajoitu niissä oleviin Arduino-levyihin, voit käyttää myös muita "aivoja". Tämän menetelmän etuna robotin luomiseen tyhjästä verrattuna on, että materiaalien etsiminen ja rakenteiden kehittäminen eivät voi häiritä sinua. Tällainen robotti näyttää melko vakavalta ja näyttää teolliselta.
Mielenkiintoisin, mutta myös vaikein, on mielestämme täysin itsenäinen robotin luominen. Kehon kehittäminen improvisoiduista materiaaleista, leluautojen mukauttaminen näihin tarkoituksiin ja muihin vanhentuneisiin laitteisiin voi olla yhtä jännittävää kuin robotin käyttäytymisen ohjelmointi. Ja lopputulos on täysin ainutlaatuinen.
Jos olet vasta aloittamassa Arduino-robotiikan oppimista, suosittelemme kurssiamme.
Kaikki hinnat ovat 22.5.14.
Osa taistelutehtävistä voidaan ratkaista tehokkaasti kauko-ohjattavien laitteiden ja robottijärjestelmien avulla. Tällä hetkellä maassamme ja ulkomailla kehitetään suuri määrä erilaisia asevoimille tarkoitettuja robotteja. Yksi viimeisimmistä kotimaisista kehityksestä tällä alalla on Platform-M-kompleksi. Ei niin kauan sitten Rostov-on-Donissa pidetyn näyttelyn "Eteläisen sotilasalueen innovaatiopäivä" vierailijat saattoivat nähdä tämän auton.
Platform-M-kompleksin kehittäminen aloitettiin kuluvan vuosikymmenen alussa. Projektin loi tutkimusteknologiainstituutti "Progress" (Izhevsk). Viimeaikaisten muutosten jälkeen projekti siirrettiin Izhmash-Unmanned Systemsille. Juuri tämä organisaatio harjoittaa tällä hetkellä edistyneen teknologian kokoonpanoa.
Platform-M-tuote on yleiskäyttöinen tela-ajoneuvo, joka voi vastaanottaa erikoisvarusteita ja suorittaa erilaisia kuljetus- tai taisteluluonteisia tehtäviä. Pienet mitat ja paino, enintään 1-1,2 tonnia, mahdollistavat koneen kuljetuksen olemassa olevilla kuorma-autoilla ja ratkaisevat menestyksekkäästi monenlaisia tehtäviä.
Monikäyttöinen robotti "Platform-M" saa panssaroidun rungon, joka tarjoaa suojan pienaseita vastaan kotimaisten standardien 3. luokan mukaisesti. toukka alusta mahdollistaa koneen liikkumisen eri pinnoilla sekä esteiden ylittämisen. Tarvittavasta liikkuvuudesta huolehtii 6 hv:n sähkömoottori. Moottori saa virtansa useista akuista, joiden ansiosta kone voi toimia yhtäjaksoisesti jopa kaksi päivää ilman lataustarvetta.
Enintään 1-1,2 tonnia painava tuote voi saavuttaa jopa 8 km/h nopeuden ja voittaa joitain esteitä. Erityisesti tarjotaan 15 asteen kaltevuus. Toiminta-alue ja säde riippuvat ensisijaisesti tehtävistä ja joistakin muista tekijöistä.
"Platform-M" voidaan varustaa erilaisilla erikoislaitteilla. Aiemmin näyttelyissä esiteltiin tornilla varustettua autoa, johon oli asennettu konekivääri ja useita rakettikäyttöisiä kranaatteja. Tarvittaessa kone voi kuljettaa muita erikoisvarusteita. Taistelulaitteet tai muut varusteet asennetaan rungon katolle erikoislaitteisiin.
Eteläisen sotilaspiirin innovaatiopäivässä esitelty lupaava robottimalli varustettiin kauko-ohjatulla taistelumoduulilla PKM-konekiväärillä sekä optoelektronisella valvonta- ja palonhallintajärjestelmällä. Tällaisten laitteiden avulla ajoneuvo voi suorittaa joitain taistelutehtäviä, mukaan lukien yksiköiden tulituki.
"Platform-M" ohjataan radiokanavan kautta kaukosäätimestä. Käytön aikana robotti ja kaukosäädin muodostavat kaksisuuntaisen yhteyden. Samalla laitteesta kaukosäätimeen lähetetään videosignaali ja tietoa eri laitteiden toimintaparametreista. Takaisin puolestaan mene komentoja varten voimalaitos, aseita tai kohdevarusteita.
"Platform-M" -kompleksin kauko-ohjausjärjestelmät koostuvat useista päälohkoista. Käyttäjän on työskenneltävä kestävään kannettavaan tietokoneeseen perustuvan ohjauspaneelin kanssa. Antennikompleksi, jossa on joukko lähettimiä ja vastaanottimia, on kytketty tähän laitteeseen, joka tarjoaa kaksisuuntaisen viestinnän robotin kanssa. Suoran näkyvyyden olosuhteissa ohjauslaitteisto varmistaa koneen toiminnan jopa 1,5 km:n etäisyydellä kuljettajasta.
Platform-M-kompleksi esiteltiin ensimmäisen kerran keväällä 2014. Sitten kauko-ohjattavat ajoneuvot osallistuivat harjoituksiin Kaliningradin alueella. Lisäksi tämä tekniikka esiteltiin Kaliningradin paraatissa 9. toukokuuta. Myöhemmin kompleksista tuli viime vuoden puolustusministeriön innovaatiopäivän näyttely.
Viime vuonna ilmoitettiin, että robottikompleksi "Platform-M" tuli sarjaan ja toimitetaan asevoimille. Sarja-ajoneuvoissa on erilaiset komponentit ja ne on varustettu erilaisilla aseilla. Esimerkiksi viime vuoden valokuvissa nähtiin taistelumoduuleja konekivääreineen ja rakettikäyttöisillä kranaateilla. "Eteläisen sotilaspiirin innovaatiopäivän" näyttelyyn osallistui puolestaan "Platform-M" konekiväärin kanssa.
Esittelemme valokuvakatsauksen lupaavasta "Platform-M" -robottikompleksista, joka esiteltiin puolustusministeriön äskettäisessä näyttelyssä.

Yleiskuva tuotteesta

Caterpillar-robottikone

toukka

Jäljet jalkakäytävällä osoittavat hyvin "Platform-M":n ohjattavuuden



Yleiskuva taistelumoduulista konekivääreillä

Asevarustelun tukialusta



Konekivääri kiinnitetään alustalle

Nostomekanismi
Yhden 18650 litiumionikennon nimellisjännite on 3,6-3,7 V. Täysin ladattu kenno tuottaa 4,1-4,2 V. Mutta minimijännitteellä se on vaikeampaa - lopullinen purkausjännite riippuu akun tyypistä ja tämä luku saattaa vaihtelevat välillä 2,6-3,2 V. Voit purkautua vielä pienemmälläkin tasolla, mutta tämä on varma tapa akun nopeaan kulumiseen. Päätin karhentaa arviota akun tuottamasta jännitteestä nimellis-maksimialueella. Sitten käy ilmi, että kahden, kolmen ja neljän peräkkäisen akun kokoonpanot antavat meille 7,2-8,4 V, 10,8-12,6 V, 14,4-16,8 V. Tällaisesta kokoonpanosta on saatava kaksi jännitettä - jonkin verran jännitettä moottorit ja 5 V sähkönsyöttöön. 6 V:n moottoreille on mahdollista syöttää virtaa kahdella akulla DC/DC buck -muuntimella, mutta vähimmäisjännitearvon (kun akku on purettu nimellisarvoon 7,2 V) ja 6 V:n ero on noin 1,2 V, mikä ei välttämättä riitä DC/DC buck -muuntimen vakaaseen toimintaan - ongelmien välttämiseksi sen tulon ja lähdön välillä on oltava vähintään 2 V jännite-ero (itse asiassa se voi olla pienempi matalan keskeyttämisen muuntimet, mutta emme keskity niihin). Olemme varsin tyytyväisiä kokoonpanoon kolme elementtiä, hankimme tarvittavat jännitteet käyttämällä alennettuja DC/DC-muuntimia. Moottoreita saa myös 9V jännitteellä, niin saamme pahimmassa tapauksessa eron 1,8V, mikä pitäisi riittää. Myös neljän elementin kokoonpano sopii, mutta sinun on ymmärrettävä, että lisäakku on ylimääräinen paino ja vie tilaa, vaikka koko akun energiankulutus on korkea.
Toinen tapa organisoida teho on käyttää samojen akkujen rinnakkaisliitäntöjä ja DC/DC tehostusmuunninta. Sitten 3,6-4,2 V jännite voidaan nostaa elektroniikassa 5 V:iin ja moottoreille 6-9 V:iin. Näyttää siltä, että tällaisen akkukokoonpanon kapasiteettia voidaan helposti vaihdella lisäämällä uusia kennoja, mutta älä unohda, että käytettävien akkujen kapasiteetin ja sisäisen vastuksen on oltava samat.
Sarja- tai rinnakkaisakkujen lataamiseen/purkuun on olemassa erityisiä ohjainkortteja. Suojausohjaimet suojaavat akkukokoonpanoa ylilataukselta tai purkautumiselta (jännitteen ohjaus), oikosululta, sallitun purkausvirran ylittämiseltä. Tällaisia yksinkertaisia kortteja käytettäessä tarvitaan ulkoinen virtalähde latausvirran rajoituksella. Lataus/purkausohjaimet pystyvät lataamaan akkuja itsenäisesti cc/cv-menetelmällä latausvirran rajoituksella. Kehittyneet ohjaimet akkujen sarjaliitäntää varten voivat myös tarjota yksittäisen latauksen jokaiselle akulle - ne tasapainottavat akkukennoja.
Valitsin akun sarjakytkentätavan suojalevyllä ja ulkoisella laturilla. Tulevaisuudessa tällainen yksinkertainen ohjauskortti voidaan korvata tasapainotetulla latausohjaimella. Vaikka, klo rinnakkaisliitäntä Tasapainotusta ei vaadita, on pidettävä mielessä, että jos yksi akku on voimakkaasti kulunut, säädin ei pysty havaitsemaan tätä ja tämä voi olla täynnä jotain. On myös syytä ottaa huomioon, että kunkin akun toimintatilat ovat erilaiset. Esimerkiksi kun sama teho poistetaan, rinnakkaiskytkennässä olevien akkujen on annettava enemmän virtaa kuin rinnakkaiskytkennässä.
Siksi sopivat moottorit, joiden nimellisjännite on 6 V ja toiminta-alue 3-9 V. Valitsin moottorin, jonka nopeus on 281 rpm ja kulutus tyhjäkäynnillä 80 mA. Kuormituksen alaisena nopeus laskee 238 rpm:iin, virta kasvaa 380 mA:iin, kun taas moottori tuottaa 2 W tehoa ja kehittää vääntömomentin 0,5 kg * cm. Kun moottori sammutetaan, vääntömomentti kasvaa 4 kg * cm: iin ja virta 900 mA: iin. Kaikki nämä ominaisuudet otettiin yhden tavaran myyjän verkkosivustolle lähetetystä levystä, koska en löytänyt normaalia "tietolehteä".
Rungon ja alavaunun kokoonpano
Tilasin seuraavat moottorit.
Jos katsot kuvaa, näet moottoreista ulkonevat akseleissa olevat urat. Näille moottoreille löydettiin sarja kytkimiä ja pyöriä.

Pyörät, joiden halkaisija on 80 mm, pehmeä kumi, nastoitettu.


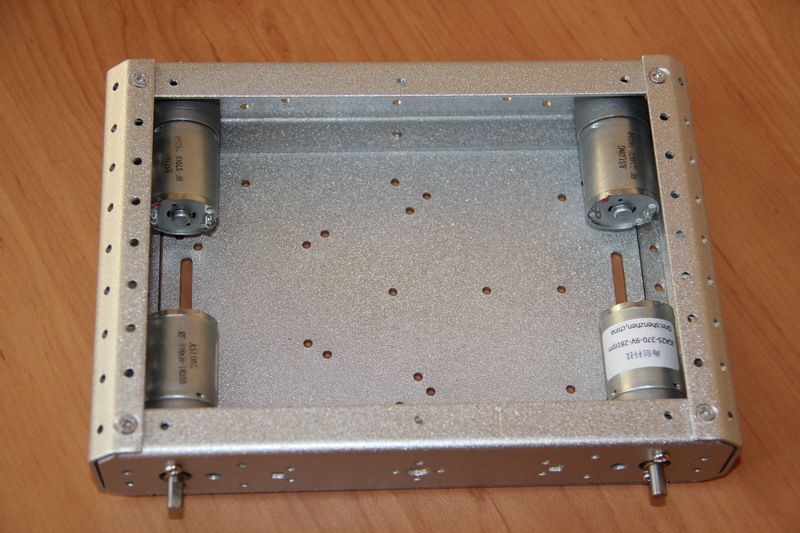
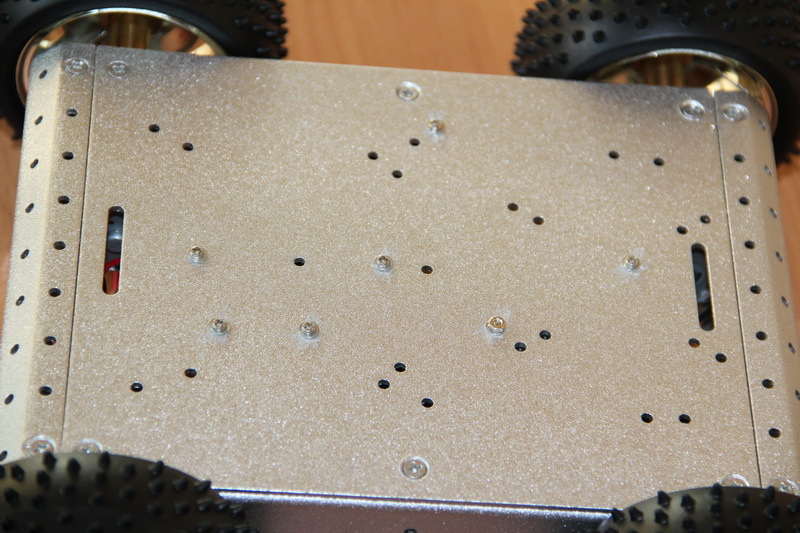
Itse aioin tehdä leveistä alumiinikulmista (tai jostain vastaavasta rautakaupoista löytyvästä) pohjan, jolla tehdä "sivurunko", joka suljetaan kevyillä, kestävillä metallilevyillä. AT oikeita paikkoja reikiä porataan ja kierretään tarpeen mukaan. Päätin kuitenkin ensin etsiä, mitä Kiinan teollisuudella on tarjottavanaan. Ja löysin sarjan - alustasarjan robotin rakentamiseen, joka sisälsi itse rungon, edellä mainitut moottorit, kytkimet ja pyörät sekä paristolokeron AA-paristoille, virtakytkimen, pistorasia ja kiinnikkeet. Kotelossa itsessään on paljon reikiä, mikä tekee siitä loogisesti kevyemmän ja niiden läsnäolon pitäisi minimoida lukkosepän työn määrä.


Arvioituani sisätilan mitat ja tilavuus (samanaikaisesti valittiin alustan elektroniikka, jonka piti sopia tähän tapaukseen), tilasin tämän sarjan. Saapuneissa moottoreissa, kuten yllä näkyy, jostain syystä lukee JGA25-370-9v-281rpm. Miksi juuri 9v, kun tämän alaryhmän nimellisarvo on 6 V, en ymmärtänyt, mutta luultavasti kiinalaiset tietävät paremmin mitä kirjoittaa voidakseen myydä paremmin.
Itse kotelo painaa lähes 400 grammaa. Mistä materiaalista se on valmistettu, minun on vaikea vastata, mutta se ei näytä puhtaalta alumiinilta.




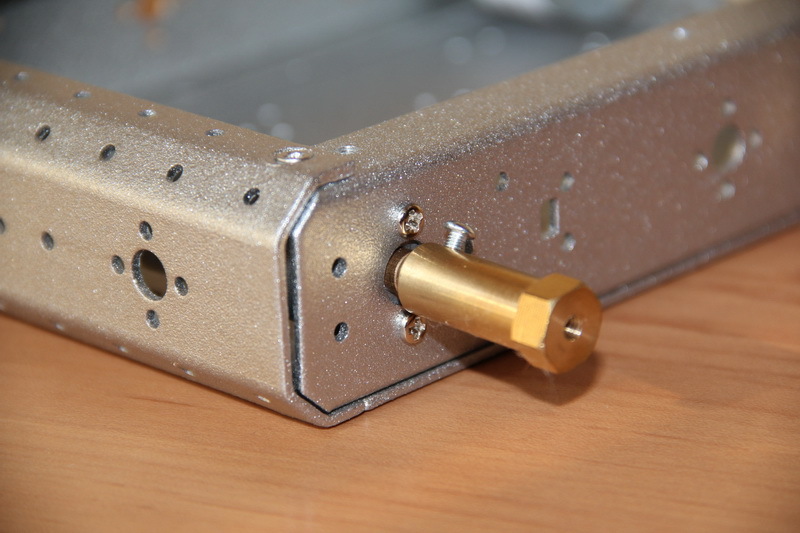
Irrota kansi ja asenna moottorit. Moottoreiden reiät ovat halkaisijaltaan vain M3-ruuveja varten, asennon säätämiseen ei ole marginaalia, mutta meidän on kunnioitettava, tämä ei aiheuttanut ongelmia - reiät vastaavat selvästi moottorin kotelon kierteitä.


Asennamme liittimet.

Ja pyöritä pyöriä.


Tuloksena oli valmis alusta, jonka maavara oli noin 23 mm.

"Tyhjäkäynnin" alustan paino oli hieman yli kilogramma. Muistatko kuvat yksittäisten osien massan mittauksella? 393+(58+85+20)*4 = 1045 grammaa. Koko kokoonpano painaa 1057 grammaa. 12 grammaa lisätty 16 pulttia.

Tässä on sellainen osoittautunut, melko mukava, alusta.

Kytkentäkaavio
Tässä kannattaa selittää tärkeä pointti miksi juuri tämä valas. Tosiasia on, että jos teemme kotelon itse, sen sisäinen tilavuus voidaan tehdä mielivaltaiseksi. Ostettu kotelo tarjoaa meille tiukasti kiinteän tilavuuden, johon kaiken täytyy mahtua. Ihannetapauksessa marginaalia on myös jäljellä. Tämä on aluksi otettava huomioon ja ymmärrettävä: sopiiko tarvittava täyttö tähän tapaukseen vai ei, ja on tarpeen joko vaihtaa elektroniikka tai valita toinen kotelo. Kotelon sisälle asennetaan: moottorit, akku, moottoreiden ohjain, tehokortti, johon myös jonkinlainen elektroniikka sijoitetaan - samat jännitemuuntimet.Näyttää olevan selvää, mitä meillä on sisällä. Mutta miten se kaikki liittyy? Jos sinulla on idea, mutta et voi luoda sen kuvaa, sinulla ei ole ideaa. Elektroniikassa käy ilmi, että kuvan pitäisi olla kaksi - visuaalinen, joka on jo melko kuviteltu, ja sähköinen (itse asiassa on myös algoritminen - kun laitteen käyttäytymistä kuvataan sen vuoksi laitteisto- ja/tai ohjelmistoominaisuudet (laiteohjelmiston toiminnallisuus).
Käytän paljon aikaa töihin matkustamiseen. Yleisesti ottaen oikealla lähestymistavalla pitkä matka voidaan kääntää plussaksi lukemalla kirjoja, katsomalla/kuuntelemalla populaaritieteellisiä ohjelmia tai äänikirjoja, joita et koskaan lukisi, kuuntele tai katso. Tällaisten olosuhteiden ansiosta minusta tuli fani ja kuuntelin kaikkia mallin tarinoita kokoonpanoa varten (joten kommenteissa ei ollut kysymyksiä -). Robottihaureus ei ollut poikkeus, ja ajattelin ja piirsin alustan konseptin tiellä.
Kaavio on piirretty OneNotessa. Kuva on klikattava. Kyllä, häpeän - kytkentäkaavio näyttää periaatteettomalta. Viimeisen kolmen viikon aikana en ole pystynyt käyttämään aikaa artikkelin hienosäätöön, ja kysymys on jo herännyt - julkaistako jotain tai lykätä sitä "myöhemmäksi". Päätin julkaista sen tällä tavalla, muuten "myöhemmin" se voi olla täynnä. Piirrän normaaleja kaavioita - vaihdan kuvat. Toisaalta tämä malli näyttää alkuperäisen DIY-tyyliltä. Töissä tai kotona, kun jokin idea muodostuu, otetaan ensin tavallinen paperiarkki ja tavallinen kynä ...
Katsotaanpa käsitettä siitä, mitä ja mihin yhdistämme. Kolme 18650-akkua on kytketty D1-litiumioniakun ohjaimeen. yhteinen maa”, joka on kytketty P-ohjaimen D1 lähtöön. Lähtö P+ on kytketty sulakkeen FU1 ja kytkimen SW kautta DC/DC-muuntimien D3 ja D4 tuloihin. Muunnin D3 tuottaa jännitteen moottoreille, D4 - kaiken elektroniikan syöttämiseksi. Näiden muuntajien lähdöt on kytketty moottoriohjaimeen D5, johon moottorit on kytketty. Vasemman puolen moottorit ML1, ML2 on kytketty MA-kanavaan ja oikean puolen MR1, MR2 MB-kanavaan. Ohjain on kaksikanavainen, mikä tarkoittaa, että on mahdollista ohjata kahta moottoriryhmää (kanavat A ja B), mutta ei erikseen jokaista moottoria varten. Portit ENA, ENB, IN1-IN4 on suunniteltu säätämään moottoreiden nopeutta ja pyörimissuuntaa. Jännitteen Vbat' muodostava resistiivinen piiri valitaan siten, että se muodostaa alueella 0 ... 5 V akun jännitteen Vbat telemetriaa. Jos Vbat = 13 V (mitä sen ei pitäisi, koska akkuyksikkö pystyy toimittamaan enintään 12,6 V, mutta olen hieman turvassa), niin Vbat' = 3,94 V (eli arvo ei taatusti laske yli 5V rajan). Resistiivisen piirin läpi kulkeva virta 12 V:lla on 3,6 mA, ja pidin näitä häviöitä hyväksyttävinä (noin 0,1% akun kapasiteetilla 3000 mAh). Ohjaimen tuloon D1 on kytketty ulkoisen virransyötön pistoke. Mutta näemme kaaviosta, että se on kytketty releen D2 kautta.
Ensinnäkin haluan selittää 10 kΩ:n vastuksen olemassaolon, joka vetää yhden virtaliittimen nastaista 5 V:n jännitteeseen. Meillä on virtaliitin, jossa on kolme lähtöä. Parilla lähtöjä on virtalähdejännite. Kolmas tulos on informatiivinen. Se on oikosulussa negatiiviseen lähtöön (se on kytketty maahan), jos pistorasiassa ei ole pistoketta ja aukeaa, jos pistoke työnnetään pistorasiaan. Siten saamme Vinon'-telemetriasignaalin virtalähteen kytkennästä: jos Vinon' = 0 jännite, niin ulkoista tehoa ei ole kytketty, jos Vinon' = 5 V, se on kytketty. 10 kΩ:n vastus vetää tämän lähdön 5 V:iin asti. Kun pistoke on kytketty, vastuksen läpi kulkee 0,5 mA:n virta, mikä on varsin hyväksyttävää.
Kun ulkoinen lähde on kytketty normaalisti suljetun releen D2 ja sulakkeen FU1 kautta, akut alkavat latautua. Normaalisti kiinni oleva rele tarkoittaa, että sen lähdöt ovat aina kiinni ja auki vain, kun ohjauskoskettimeen on kytketty jännite. Miksi rele D2? Oletetaan, että meillä ei ole tätä relettä. Jos virtalähde oli kytketty alustaan, mutta se unohtui kytkeä pistorasiaan, mistä mikro-ohjainkortti tietää, latautuuko akku vai ei? Entä jos virtalähde on kytketty pistorasiaan, mutta ei tuota jännitettä? Vai kaikki toimii, mutta virtalähde antaa vain 10V vaaditun 12V sijasta? Ja jos liitin tällaisen lähteen (joka antaa vain 10 V) akkuun, joka ei ole vielä täysin tyhjentynyt ja antaa 11 V, niin mistä tiedän - nämä 11 V muodostaa akun (joka ei itse asiassa anna ulos yli 10V) Vai ulkopuolisesta lähteestä? Tällaisia tilanteita varten mietittiin algoritmi, jota varten tarvittiin rele. Opimme ulkoisen virtalähteen kytkemisestä Vinonin telemetrialla. Sammuta rele ja katso Vin'-telemetriaa. Jos se sopii ja tämä jännite on odotetulla alueella, kytke rele päälle ja anna latausprosessi. Jos emme ole tyytyväisiä, emme kytke relettä päälle ja ilmoita toimintahäiriöstä. Anna ajoneuvon ohjauskortin, ei alustan, hoitaa analysointi- ja näyttöprosessi. Tätä varten annamme sille kaikki tarvittavat jännitteet ja ohjaussignaalin Vinoffin releelle. Vedämme relemoduulin ohjaustulon 10 kΩ vastuksen läpi 5 V:iin varmistaen, että rele on jatkuvasti päällä. 0 V:n syöttäminen tähän tuloon deaktivoi releen.
Mutta miksi juuri vedenpaisumusta edeltävä mekaaninen rele? Loppujen lopuksi voit laittaa MOSFET-transistorin. Sellainen idea oli, mutta siitä piti luopua. Nykyaikaisilla MIS-transistoreilla on pieni resistanssi (kymmeniä milliohmeja) avoimessa tilassa ja kun virta kulkee 2-5 A, se ei ole vahva merkittävä pudotus jännite ja sen seurauksena lämmitys - itse transistorin kotelo voi haihduttaa pienen määrän tehoa jopa ilman patteria. Mutta tässä on kyse järjestelmästä, jossa tällainen digitaalinen avain ohjaa virtalähteen kytkentää passiiviseen kuormaan. Laitamme transistorin kahden lähteen väliin, minkä seurauksena nielun ja lähteen välinen jännite-ero voi olla merkittävä, mikä johtaa lisääntyneeseen lämmön haihtumiseen ja transistori kuumenee hyvin. Lisäksi transistorin avaamiseksi tai lukitsemiseksi sinun on tehtävä ohjauspiiri (ohjain), koska ohjausjännitetaso mikro-ohjainkortilta on 5 V, mikä ei riitä luomaan hilalähteen jännite-eroa transistorin ohjaamiseksi (Transistorin ohjaamiseksi, esimerkiksi IRFZ44N, meidän on kytkettävä 8-12 V sen porttiin avataksemme sen). Olipa kyseessä valmis relemoduuli, joka tarvitsee vain kytkeä ja joka jo suljettuna kytkee lähdön taatusti tuloon ilman ongelmia.
Näin ollen meillä ei ole vain kytkentäkorttia, vaan täysivaltainen tehokortti. Levy on varustettu DC/DC-muuntimilla, resistiivisillä piireillä, sulakkeella ja joukolla liittimiä elektroniikan liittämistä varten. Rakenteellisesti voidaan erottaa kaksi liitintä. Liitin CON1, johon akkupaketti, virtakytkin/painike, virtaliitin, relemoduuli, moottorit, moottorin ajurikortti – kaikki alustan sisällä olevat oheislaitteet liitetään. Ja liitin CON2, jonka tarkoitus on liittää ohjauskorttiin. Tämä liitin antaa ulos telemetria- ja ohjaussignaaleja, 5 V jännitettä, ja on myös hyödyllistä "heittää" jännite Vbat akusta - annamme mahdollisuuden järjestää omia tehokanavia eri jännitteillä, esimerkiksi 6 V virransyöttöä varten servot.
Rungon elektroniikka
Elektroniikka valittiin rinnakkain kehityksen kanssa virtapiiri laitteet.
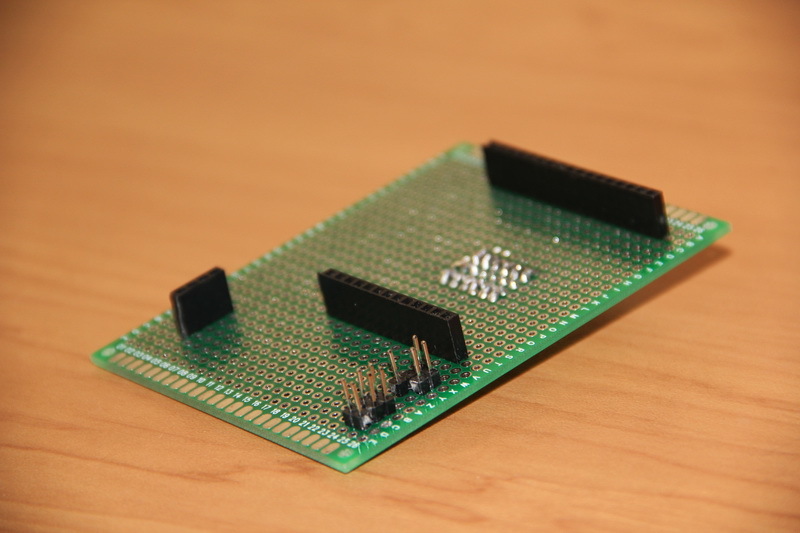
Virtapistoke vipukytkimellä lähti toimimaan vastaanotetusta alustasarjasta. Valittiin ja ostettiin L298N-siruun perustuva moottoriohjain, XL4005 DC/DC-muunninkortti, nimeämätön relemoduuli, akkulokero ja piirilevy, jonka mitat ovat 50x70 mm ja reikäväli 2,54 mm.
Lisäksi tarvitsemme myös seuraavat materiaalit.

Kuvan yläreunassa on useita pitkiä nastaliittimiä, joiden jako on 2,54 mm, sekä pistorasioita, alla - metalliset koskettimet kaapelissa, vasemmalla - pistokkeet niille, oikealla - M2-ruuvit, mutterit ja aluslevyt. Eri liikkeissä olevia levyn ja kaapelin liittimiä kutsutaan eri tavalla. Historiallisista syistä kutsun pinniotsikoita PLS:ksi, kortin liittimiä - PBS, kaapelin liittimiä - BLS. Internetissä ulkomaisilla sivustoilla tällaisia liittimiä haetaan kyselyllä, kuten "2,54 mm liitin" tai "dupont-liitin". Lisäksi tarvitset erilaisia kulutustarvikkeita - juotetta, sulatetta, johtoja ja niin edelleen, sekä sarjan Käsityökalut- lankaleikkurit, pinsetit, ruuvimeisselit jne. - niillä, jotka ovat ainakin jotenkin mukana tee-se-itse (Do It Yourself - tee se itse) ovat yleensä kaikki tämä.
Ennen elektroniikan ja kotelon tilaamista pohdin, että valitun elektroniikan pitäisi sopia sisätiloihin ilman ongelmia. On aika tarkistaa asia: järjestämme elektroniikan ja merkkaamme tulevat istuimet.


Aloitetaan nyt levyjen valmistelu.
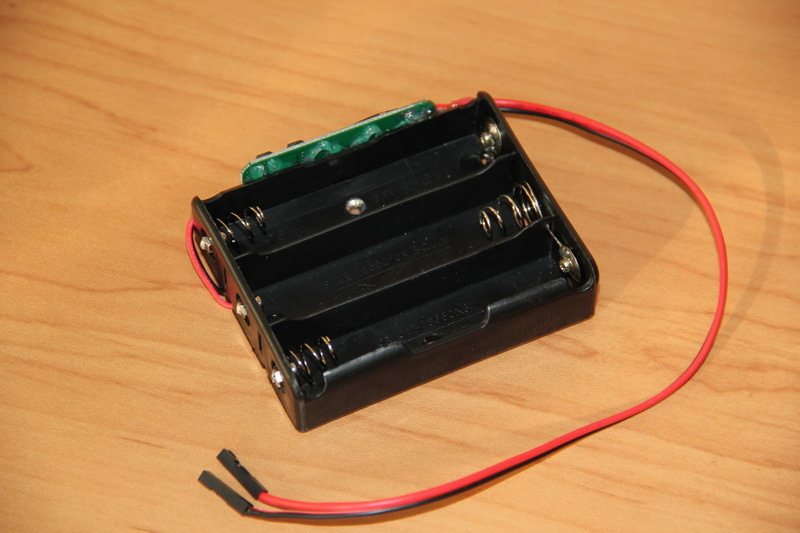
Aloitin akusta. Litiumioniakkujen ohjain "istutettiin" sulateliiman päälle ja siihen juotettiin koskettimien navat ohjeen mukaisesti. piirikaavio. Luulen, että lukijoita kiinnostaa mitä tehtiin ja millä työkalulla, joten postasin artikkelin lopussa spoilerin alle kuvia joistakin käytetyistä laitteista lyhyiden kommenttieni kera. Kuumaliima levitettiin lämpöpistoolilla. Sitä ennen minun piti kuitenkin työskennellä tämän osaston luotettavuuden lisäämiseksi. Varoitan kaikkia, jotka aikovat tehdä jotain - on parempi olla tekemättä virhettäni ja ottaa kestävämpiä akkulokeroita. Aikoinaan en löytänyt tällaisia lokeroita vähittäiskaupasta millään tavalla, ja kun löysin ne, arvostin niitä paljon ilosta, sieluni yksinkertaisuuden vuoksi. Eikä se ole heille niin helppoa. Koska tässä lokerossa litteillä, ulkonemattomilla positiivisilla tyynyillä varustetut paristot eivät yksinkertaisesti saavuta kontaktia. Lisäksi kaikki jousikuormitetut koskettimet pyörivät, kosketin on huono. Siksi minun piti ruuvata M2-pultit kiinni, purkaa ylimääräinen, ruuvata mutterit kiinni ja kiristää kontaktin parantamiseksi. Mutta tämä ei mielestäni riittänyt, ja juotin myös kaikki liitännät perusteellisesti. Sillä jos jotain tehdään, sen on oltava luotettava, jotta se ei aiheuta ongelmia tulevaisuudessa eikä palaa tähän uudelleen.
On huomattava, että litiumioniakuissa käytetään tavanomaista säädintä ilman tasapainotusta. Tämä tarkoittaa, että kun yksi kolmesta akusta latautuu, ohjain todennäköisesti keskeyttää kaikkien akkujen latauksen. Itse asiassa tämä on vain suojalevy akkujen alhaiselta purkaukselta ja ylilataukselta sekä purkausvirran ohjaus. Siksi on toivottavaa käyttää akkuja, joilla on sama todellinen kapasiteetti. Jos käytät säädintä, jossa on tasapainotus, kapasiteetin valinta on vähemmän kriittinen ja paristoja käytetään tehokkaammin, mutta tällaiset ohjaimet ovat kalliimpia ja vievät enemmän tilaa. Kuinka valita akut, joilla on sama todellinen kapasiteetti? Loppujen lopuksi, kun olet ostanut samat akut samasta sarjasta, jopa tuotemerkeistä, kapasiteetti voi vaihdella 5-10%, ja kiinalaiset akut, joissa on 6000-8000 mAh merkinnät, ovat yleensä tuntemattoman kapasiteetin akkuja. Todellisten kapasiteettien mittaamiseen käytin OPUS BT-C3100 -laturia, joka on melko suosittu ympäristössäni. Sen avulla tarkastettiin 12 ostettua akkua ja valittiin kolme, joiden kapasiteettialue on minimaalinen eikä ylitä muutamaa prosenttia. LG LGABC21865 akkujen kapasiteetiksi ilmoitettiin 2800 mAh, mutta todellisuudessa se vaihteli välillä 2400-2500 mAh (testattu 700 mA virralla).
Pieni poikkeama pohdinnan muodossa. Laturi laski meille akkukapasiteetin ottaen huomioon niiden latauksen 4,2 V asti ja purkautumisen, jos en erehdy OPUS BT-C3100:een, 2,8 V asti. Meidän tapauksessamme akkuja ei pitäisi purkaa vähemmän kuin nimellisarvo 3,5-3,7 V. Eli akkujen toimintakykymme on paljon pienempi kuin mitattu. Tämä on otettava huomioon. Ehkä tulevaisuudessa kannattaa harkita neljän akun akkupakettia. Onko mahdollista yksinkertaisesti vaihtaa akku ja virtalähde lataamaan se? Arvataan. Jännitealueeksi saadaan 14,4-16,8 V. Jännitteenmuuntimet toimivat jopa 32 V:n tulojännitteellä. Resistiiviset jakajat antavat meille telemetriasignaalien jännitealueen 4,3-5,1 V, mikä on hieman ylemmän alueen ulkopuolella. 0-5 K. Mutta tämä voidaan torjua ohjauskortin tasolla - jos telemetriajännite on 5 V, akkupaketti on melkein latautunut hetken kuluttua. Toisaalta, jos lasket moottoreiden jännitteen 6-7 V:iin, voit purkaa olemassa olevaa akkupakettia enemmän ja käyttää akkuja tehokkaammin - tässä tapauksessa tarvitsee vain säätää yhtä jännitteenmuuntajaa. Ensisilmäyksellä on tilaa tulevalle tutkimukselle ilman laitteiston vaihtamista ja kuinka telemetriasignaalit tulkitaan tarkalleen asennetun akun mukaan - päättäköön se ohjauskortin tasolla, eli toistaiseksi sinä ei voi ajatella sitä.
Irrotin lähtöjohdot tuloksena olevasta akusta erityisillä pihdeillä (stripper) ja puristan ne metallisiin koskettimiin puristuspihdeillä (crimp), juotin ne luotettavuuden vuoksi ja laitoin niihin muovikotelot, jolloin sain BLS-liittimet. Juottamiseen käytettiin juotosasemaa, juotteena POS-61 ilman hartsia ja ei-puhdasta FluxPlus NC-D500 juoksutteena.


Akun kokoamisen ja akkujen asentamisen jälkeen se ei tuota mitään. Näin monta litiumioniakkujen säätimiä on järjestetty - ne poistavat kuorman oikosulun, voimakkaan purkauksen, ylimääräisen purkausvirran sattuessa. Suojauksen nollaamiseksi ja akun saattamiseksi toimintakuntoon sinun on kytkettävä 12-12,6 V +P / -P koskettimiin. Sama tulee tehdä, kun paristot on liitetty ensimmäisen kerran ohjaimeen. Tämän jälkeen voit varmistaa, että laite tuottaa jännitettä, jos paristot on kytketty oikein säätimeen.
Tällaisten akkukokoonpanojen lataamiseen on olemassa virtalähteitä, joiden lähtöjännite on 12,6 V (3x4,2 V). Tällaisella virtalähteellä akkuja käytetään tehokkaammin, vaikka myös 12 V virtalähteitä voidaan käyttää. Minulla on jo sellainen virtalähde, jonka lähtö on 12,6 V ja virta 5 A. hän ilmoitti ominaisuudet. Yksinkertaisin testi on kantavuustesti. Tätä varten käytin 1 ohmin 10W ja 4,7 ohmin 10W keraamisia vastuksia. Kun olen koottu sellaisista vastuksista kokoonpanon, jonka resistanssi on 2,5 ohmia, liitin siihen virtalähteen ja mittasin jännitteen sen lähdöstä. Nimellisvirralla 12,6 / 2,5 \u003d 5 A virtalähteeni antoi 12,6 V - tämä on erinomainen tulos. Kiinalaiset virtalähteet, joihin on kirjoitettu jotain, kuten 12V3A, alkavat usein "upota" 10-20% vain noin 1 A:n kuormalla.


Analogisesti valmistettiin kytkin ja pistorasia.

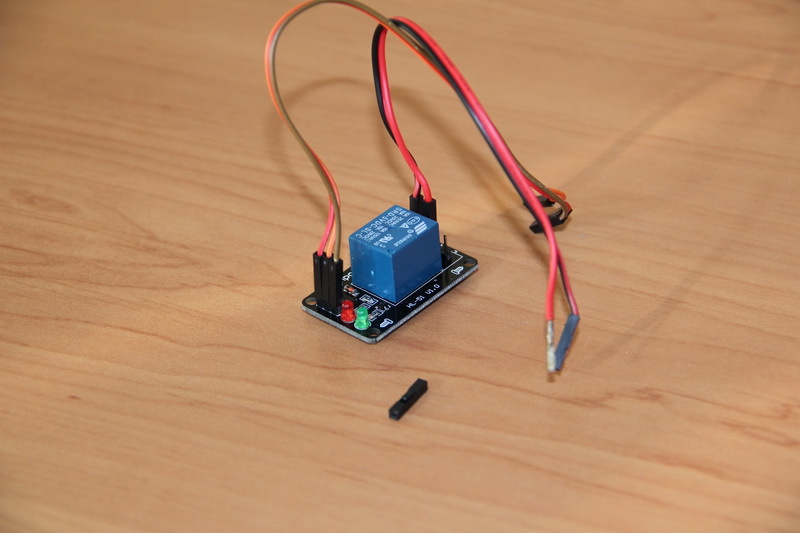
Relemoduulin riviliitin irrotettiin hiustenkuivaajalla ja PLS-koskettimet juotettiin. Tämän moduulin liittämiseksi virtakorttiin tein johdot - kuorin, puristan ja juotin virtajohdot (jonka kautta virtaliitin ja akku kytketään) poikkileikkaukseltaan 18-20 AWG. Ja ohjaukseen käytin johtoja, joita minulla on, ohuemmilla johtimilla, joita on helppo etsiä nimellä "Dupont".

Sama tehtiin moottorin kuljettajan kanssa.


"Jalat" juotettiin DC / DC-muuntimiin. On syytä mainita, että nämä koskettimet on valmistettu metallista, joka juotetaan hyvin vain aktiivisella juoksutuksella. Sitten käytän FluxPlusin sijaan LTI-120:ta, minkä jälkeen juotoskohdat pyyhitään isopropanolilla kostutetulla liinalla juoksutusainejäämien poistamiseksi.

Nyt teemme levymme elektroniikalla. Aluksi on hyvä kuvitella yleisesti, miten ja mitä laudalla yhdistetään. Eli yritä piirtää piirilevy.
[Virtajohto]

Arvatkaapa mistä minä keksin ja "nuolaisin" tämän taulun? Näemme levyllä kaksi liitintä, kaksi jännitemuuntajaa. Ylimääräinen hyppyjohdin (irrotettava hyppyjohdin) on ilmestynyt, joka voidaan asentaa sulkemalla sulake pois sähköpiiristä - tein tämän tarkoituksella, koska sulake puuttui banaalista levyn valmistushetkellä.
Levyn purkaminen on melko työlästä ja huolellista työtä. Käytin 18-20 AWG johtoa tehona, 26-30 AWG johtoa muihin signaaleihin. Miksi leipälauta ja vaivaa johdotuksen kanssa? Koska meillä on vasta ensimmäinen prototyyppi. Jokin voi muuttua, joten johdotuksen uudelleenjuottaminen on helpompaa kuin raitojen leikkaaminen ja kaikenlaisten hyppyjohtimien juottaminen valmiille piirilevylle. Painetun piirilevyn tekeminen - jalostaminen, maskin tekeminen, peittaus, poraus, tinaus, juottaminen - vie aikaa - on epätodennäköistä, että tämä vie vähemmän aikaa kuin "johdotuksen" sisältävän levyn tekeminen. Siitä huolimatta painettu piirilevy luotettavampi ja ammattimaisemman näköinen.
Samoista syistä DC / DC-muuntimien moduuleja ei juoteta levylle, vaan ne on valmistettu irrotettaviksi moduuleiksi, ihannetapauksessa alkuperäisen virheenkorjauksen jälkeen ne on kiinnitettävä lisäksi liittimeen, esimerkiksi pudottamalla kuumaa liimaa . Ei paha samalla tavalla lisätä kaikkien liittimien liittämisen luotettavuutta. Mutta vaikka meillä on prototyyppi, meidän on helpompaa tehdä kaikki irrotettavissa, jotta tulevassa virheenkorjausprosessissa meillä on vapaa pääsy kaikkiin tärkeisiin solmuihin ja helpottaa sen vaihtamista tarvittaessa.




Levyn valmistuksen jälkeen on ehdottomasti tarkistettava vastaanotetun piirikaavion ja kytkentäkaavioiden yhteensopivuus. Yleismittarilla tarkistan tulot ja lähdöt oikosulun varalta (on parempi olla "soittaa" koskettimia, vaan mitata niiden vastus, koska esimerkiksi virheellisen valmistuksen tai suunnittelun tapauksessa resistanssi on sata ohmia voi muodostua tuloon, joka ei välttämättä "soi ulos" ”, mutta sen läsnäolo on virhe piirissä ja voi aiheuttaa suuria ongelmia), ja varmista myös, että kaikki on kytketty niin kuin sen pitäisi olla levyn sisällä.
Kun olet tarkistanut ennen asennusta, varmista, että kortti toimii normaalisti kaikkien oheislaitteiden ollessa kytkettyinä. Tätä varten sinun on ensin kytkettävä akku, virtakytkin ja käännettävä kytkin. Jännitteenmuuntajien LEDien pitäisi syttyä eikä mikään pala. Kun mitään ei ole kytketty, on tarpeen säätää muuntajien lähtöjännite. Sitten virta katkaistaan, relemoduuli kytketään ja virta kytketään uudelleen. Siten kaikki oheislaitteet on kytketty vaiheittain ja hallinnassa.
Alustaelektroniikan asennus ja liitäntä
Elektroniikka on valmis. Nyt sinun on asennettava se. Muistatko, että elektronisten taulujen istuimet oli merkitty? Reiät porataan oikeisiin paikkoihin akkuruuvimeisselillä. Sitten ne kiillotetaan miniporalla, jossa on hiontasuutin. M2-ruuvit ruuvataan reikiin. Aluslevyt on asetettava ruuvien ja muttereiden alle. Lisäksi ruuvasin kiinni toisen mutterin - lukkomutteri tarjoaa luotettavamman kierreliitoksen ja vähentää sen purkamisen todennäköisyyttä. Valmistamme konetta.
Huomaa, että kahden vierekkäisen moottorin välinen etäisyys on melko suuri. Tämä on tärkeä seikka, johon kannattaa kiinnittää huomiota seuraavasta syystä. Tosiasia on, että valitut moottorit ovat ilman palautetta. Käytämme vain tietyn tason jännitettä niihin ja ne pyörivät tietyllä nopeudella. Mutta moottoreiden ominaisuudet voivat vaihdella, mikä johtaa varmasti ongelmiin suoraviivaista liikettä. Jos moottoreiden leviäminen on pieni ja robottia ohjaa vain kuljettaja, joka voi aina korjata liikkeen, tämä ei välttämättä ole merkittävä ongelma. Mutta jos leviäminen on merkittävä tai robotin on kuljettava pitkä matka "suoraan" automaattitilassa, palautetta on annettava. On olemassa sarja GM25-370-moottoreita, jotka ovat rakenteeltaan identtisiä ja joihin Hall-anturit on jo asennettu. Mikä se on? FROM kääntöpuoli moottori, pitkänomaiseen akseliin on kiinnitetty kiekko, johon on asetettu magneetti, joka vaikuttaa Hall-anturiin. Jokaisen levyn täyden kierroksen jälkeen saamme pulssisignaalin, jonka käsittely voidaan asettaa kierrosten lukumäärään minuutissa. Näin ollen alustallamme on melko vakava pohja tulevaisuutta ajatellen: on mahdollista asentaa moottoreita takaisinkytkennällä, liittää ne tehokorttiin, joka antaa virran niissä oleville antureille ja lähettää telemetriasignaaleja ohjauskortille - ohjausjärjestelmä voi tasoittaa automaattisesti moottoreiden nopeudet.


Juotin johdot moottoreihin niissä olevien merkkien mukaisesti - jokaisessa moottorissa oli punainen piste yhden kahdesta koskettimesta. Saatuani moottorit tarkistin ne, mutta en kiinnittänyt huomiota tämän merkinnän oikeellisuuteen. Yksi moottoreista muuten tuli avioliiton kanssa eikä vierinyt ollenkaan, myyjä lähetti ystävällisesti minulle korvaavan, joka saavutti minulle vähintään kuukauden. Myöhemmin kävi ilmi, että yhdessä moottoreista oli merkinnät sekaisin, mutta tällä ei ole väliä - muuta vain tämän moottorin liittämisen napaisuutta virtakorttiin. Eteenpäin katsoen sanon, että sama tilanne tapahtui "laudat" kytkennän kanssa - kun "eteenpäin" -komento annettiin, oikeanpuoleiset pyörät kiertyivät eteenpäin, vasemmalla - taaksepäin. Tämä korjataan myös muuttamalla moottorin ajurin halutun kanavan liittämisen napaisuutta tehokorttiin. Kytkennän napaisuuden muuttaminen - ei tarvitse juottaa tai tehdä uudelleen mitään, sinun tarvitsee vain vaihtaa johdot.
Välttääkseni sähköisen kosketuksen elektroniikkalevyjen ja kotelon välillä leikkasin läpipainopakkauksesta alustan pohjalle muovilevyjä.

Asenna akku. Muovi on erittäin pehmeää ja kirjaimellisesti painuu ruuvin kannan alle, edes aluslevy ei säästä, joten jouduin käyttämään pitkää metallilevyä.


Kaikki pohjapuolen pultimme ja mutterimme pienensivät hieman maavaraa ja näyttävät varsin esteettiseltä.

Eristämme pohjan paikoissa, joihin elektroniikkalevyt asennetaan. Leikkaamme myös ja laitoimme muovinauhan akun metallilevylle, jotta ruuvin pään akkukotelo ei edes naarmuunnu, litium on vakava asia!


Asennamme ja kiinnitämme elektroniikkalevyt ja virtaliittimen.






Painajainen, kuinka monta johtoa... Yhdistämme oheislaitteet virtakorttiin.


Lavan ohjauselektroniikka
Kuten ymmärrät, periaatteessa tehtävä on suoritettu. Alusta vastaanotettiin, kaikki sujui melko hyvin. Alustan ohjaamiseen voit käyttää mitä tahansa mikro-ohjainta, FPGA:ta, Arduino-kortteja, Intel Galileoa ja paljon muuta.Valitsin Arduino Nano -levyn, löysin edullisen ja kätevän laajennuskortin oheislaitteiden ja bluetooth-moduulin liittämiseen siihen. Perusideana on ohjata alustaamme älypuhelimesta bluetoothin kautta. Laajennuskortti, jossa on runsaasti kontakteja ulkoisten laitteiden liittämistä varten, mahdollistaa tulevien robottien oheislaitteiden saumattoman liittämisen tulevaisuudessa.


Nyt meidän on suunniteltava ja valmistettava piirilevy tälle elektroniikalle. Teemme "sandwich": piirilevyn, johon bluetooth-moduuli on asennettu, ja laajennuslevyn, johon puolestaan on asennettu mikro-ohjain.

Virtakorttiin verrattuna tämä kortti on lähes puhtaasti kytkin. Keskellä kaapeli on kytketty 18-nastaiseen kolmiriviseen liittimeen, joka yhdistää tämän ohjauskortin tehokorttiin. Tästä liittimestä signaalit reititetään laajennuskortin tarvittaviin koskettimiin, jotka sitten menevät tarvittaviin, esivalittuihin mikro-ohjaimen koskettimiin. Lisäksi 5 V ja Vbat lähetetään erillisiin nastoihin levyllä. Virta syötetään levyllä olevaan bluetooth-moduuliin, sen Rx/Tx-tulot on kytketty Arduino Nano -kortin Rx/Tx-tuloihin laajennuskortin kautta. Kortissa on irrotettava bipolaarinen LED, jonka tarkoitus on ilmaista kaikki virransyöttöön liittyvät prosessit. LED voi muodostaa jatkuvan vihreän ja punaisen hehkun, vilkkua tietyllä taajuudella - tämän pitäisi riittää osoittamaan akun normaalijännite, sen purkautuminen, ilmaisemaan latausprosessin ja raportoimaan kytketyn virtalähteen kunnon.
Jotta en joutuisi hämmennyksiin siitä, mitä ja mihin yhdistää, piirsin kaavamaisesti Arduino Nano -levyn ja jaoin signaalit sille.

Rx/Tx-portit ovat UART-protokollan kautta toimivan bluetooth-moduulin varassa. Signaalit IN1-IN4, mikäli mahdollista, kytketään digitaalisiin portteihin - näiden signaalien napaisuus määrää moottoreiden pyörimissuunnan ja ENA / ENB portteihin, jotka mahdollistavat PWM-signaalien lähettämisen - nämä signaalit asettavat nopeuden moottoreiden pyörimisestä. Alustan telemetriasignaalien arvot digitalisoidaan Arduino Nano -levyn analogisilla tuloilla A0-A3. LED vie portit A4 ja A5, ja se on kytketty jumpperien kautta. Tosiasia on, että näitä kahta porttia tarvitaan I2C-protokollan yksinkertaiseen järjestämiseen, ja jos tarvitsemme sitä, voimme yksinkertaisesti poistaa hyppyjohtimet. LED voidaan "heittää" myös muihin vapaisiin portteihin tai liittää vapautettuihin portteihin A4 ja A5 portin laajennusmoduuli (esimerkiksi PCF8574T-sirun perusteella - se tarjoaa kahdeksan ylimääräistä digitaalista tulo-/lähtöporttia, moduulia ohjataan vain käyttämällä I2C-protokollaa), pariksi, jonka lähdöt ja kytke LED. Tämän yhteyksien jakautumisen seurauksena on säilynyt mahdollisuudet SPI-laitteiden saumattomaan liittämiseen, kahden analogisen signaalin digitalisointiin ja jopa neljän PWM-signaalin ulostuloon (esimerkiksi servojen ohjaamiseen). Yleensä haluaisin enemmän ilmaisia signaaleja, mutta niiden määrää voidaan lisätä käyttämällä PCF8574T:tä. Lopulta voit käyttää toista Arduino Nanoa tai korvata sen alustalla, joka sopii paremmin vaadittuihin tehtäviin - tämä ratkaisu tarjoaa täysin tietyn minimin.
Korttimme tarjoaa myös yksinkertaisen liitännän virtalähteeseen: siinä on 5 V:n tehokoskettimet ja jännite akusta (12,6 V asti).
On syytä huomata yksi vivahde käytetystä Arduino Nanon laajennuslevystä. Periaatteessa laajennuskortti mahdollistaa Vbatin käynnistämisen sillä. Laajennuslevylle on asennettu jännitteenmuunnin, joka laskee tulojännite 5 V asti ja syöttää sen Arduino Nano -levylle, jonka muuntaja laskee sen 3,3 V:iin ja tämä jännite on jo poistettu Arduino Nano -kortista ja jaetaan laajennuskortin vastaaviin koskettimiin. En kuitenkaan tehnyt tätä ja toin 5 V laajennuskortin vastaavaan nastaan. Lisäksi laajennuslevyn ohjaus-LED ei palanut ollenkaan, jos Arduino Nano -levyä ei ollut asennettu, eli tämä laajennuskortti ilman Arduino Nanoa on ilmeisesti itse asiassa toimimaton. En ymmärtänyt syitä, mutta panin merkille tämän kohdan.
Teemme tämän ohjaustaulun.


Asennamme siihen elektroniset levyt.



Valmistamme istuimet maksua vastaan. Asenna kytkin samaan aikaan.


Ja keräämme kaiken.


Nyt sinun on tehtävä kaapeli kahden levyn yhdistämiseksi. Juotamme myös virtaliittimet luotettavuuden vuoksi. Tarkista kaikki oikein ja erittäin huolellisesti. 12 V:n pitäisi tulla 12 V:iin ja 5 V:stä 5 V:iin. Teho- ja ohjauspiirilevyjen kuvissa näkyy “ylhäältä katsottuna”, eli jos käännät levyt ylösalaisin, niin alhaalla, juotospuolella. levyt, koskettimet ovat käänteisiä - tämä on tarpeen ottaa huomioon kaapelin valmistuksessa ja vastaavien johtojen välittämisessä. Tein liittimet yksinkertaisesti: ensin kirjoitettiin sarja BLS-liittimillä varustettuja johtoja ja käärittiin 2 kertaa teipillä. Sitten kaikki kaksi / kolme riviä koottiin yhteen ja käärittiin jälleen tiukasti teipillä. Siitä tuli kokonainen ja monoliittinen liitin. Liittimen käyttämättömät nastat asetettiin yksinkertaisesti muovisilla BLS-liittimillä ilman nastoja.
Kaapelin valmistuksen jälkeen kaikki elektroniikkakortit poistetaan ohjauskortista ja se tarkistetaan yleismittarilla samalla tavalla kuin tehokortti. Yhdistämme ohjauskortin tehokorttiin ja syötämme virran. Yleismittarin avulla tarkistamme huolellisesti kaikkien moduulien tehokoskettimet, olemme uteliaita telemetriasignaalien jännitteistä - varmistamme jälleen kerran, että kaikki on kytketty oikein. Sinun ei tarvitse tehdä tätä, koota itsevarmasti kaikki, laita virta päälle ja huomaa, että jollain tietysti mystisellä tavalla 5 V ja Vbat johdot ovat sekaisin ja Arduino-kortti ja bluetooth-moduuli palavat. Mutta on parempi olla toistamatta muiden virheitä.
Kuvassa näkyy, että yksi punaisista virtajohdoista on sävytetty hopealla. Tämä on johtimen nimitys, joka lähettää jännitteen Vbat. Kun laite on koottu, on hyödyllistä tehdä "avaimet" kytkentää varten. Älä esimerkiksi juota erikseen yhtä PLS-kosketinta liittimeen ja pilaa kaapelin vastavuoroista liitäntää tai tukkii sen eristepalalla - tässä tapauksessa toteutetaan "hölmösuojaus", koska silloin tällainen kaapeli voidaan vain asennettu virheettömästi levyn vastaavaan liittimeen, yksinkertaisesti koska sitä ei asenneta muuten (menetelmä ei anna 100% takuuta - Internet on täynnä kuvia, kun erityisen sitkeät henkilöt onnistuvat jotenkin ohittamaan tällaisen suojan kadehdittavalla sinnikkyydellä ja niiden huomattava vahvuus). Yleensä maalaan vastaavat nastat liittimiin. Tehokortin DC/DC-muuntimien tuloliittimet olisi hyvä merkitä tällä tavalla ja sävyttää kortilla vastaavat liitännät. Tämä eliminoisi muuntimien virheellisen asennuksen, ja jos käytät useita värejä, tämä eliminoi 5 V ja 9 V muodostavien konvertterilevyjen hämmennyksen. Tunnistamiseen voidaan käyttää kirkasta naiskynsilakkaa. Tämä pieni sääntö auttaa paljon kehitettävän laitteen usein kokoamisessa/purkamisessa sen virheenkorjaus- ja testausvaiheessa.



Liitä kaapeli virtakorttiin.
Haluaisin palata lyhyesti artikkelin alkuun, hetkeen, jolloin jaoimme alustan kahteen osaan ja otimme ohjauskortin "erikseen". Tuolloin se vaikutti erittäin tasapainoiselta ratkaisulta. Tarkastellessamme Arduino-laajennuslevyn runsasta nastakenttää, ymmärrämme kuitenkin, että reilu puolet näistä nastoista ei voi käyttää alustan nykyisessä toteutuksessa - otimme lähes puolet Arduino-levyn I / O-liittimistä. . Ja itse mikro-ohjain "kiertää" ei vain ohjelmaa PWM-signaalien lähettämiseksi moottoreille, vaan tarjoaa täyden hallinnan sisäiseen ja ulkoista virtaa koko alustan. Kannattaa harkita – ehkä kannattaa laittaa mikro-ohjain alustamme moottoritilaan? Bluetooth "anna" "alustan yläpuolella" olevalle elektroniikalle, joka ohjaa robotin laitteita, ja mieti sen kanssa liitettyä käyttöliittymää. Voit järjestää UART-protokollan (se vaatii kaksi mikro-ohjaimen nastaa), jonka kautta lähetetään datapaketti, joka sisältää moottoreiden pyörimissuunnan ja -nopeuden sekä alustan yleisen tilan ... Ja tarvitset harkitse tarkasti suunnittelua, koska meillä ei ole paljon tilaa moottoritilassa ... Vaikka ... Jos otat käyttöön ja siirrät releen ...
No, tähän loppuu pitkä ja joskus tylsä tarinani. Vain "laitteisto" - alustan laitteisto - on kehitetty, valmistettu ja koottu. Työn seuraava osa on ohjelmisto. Mutta tämä ei tarkoita, että vain ohjelmoijan on työskenneltävä edelleen. Mikro-ohjaimen laiteohjelmiston luomisen ja sen virheenkorjauksen aikana sinun on joskus otettava yleismittari tai jopa oskilloskooppi ja selvitettävä, mikä signaali, missä ja missä muodossa se tulee. Yleensä juuri tämän vaiheen alussa ilmaantuu suuremmassa määrin "rautaisen" suunnitteluvaiheen virheitä ja laiminlyöntejä. Laitteemme on hyvin yksinkertainen, joten jos jokin ei toimi, virhe löydetään nopeasti. Voitteko kuvitella millaista on työskennellä monimutkaisia järjestelmiä? Siellä sinun on oltava paljon varovaisempi ja tarkempi. On myös tarpeen järjestää ohjausliittymä Bluetoothin kautta älypuhelimella - keksiä jonkinlainen protokolla robotin tietovuorovaikutukselle puhelimen kanssa. Ja kehittää ohjelmistoja, joilla on mukavaa ja kätevää ohjata robottia. Mutta tämä on kaikki toinen, erillinen tarina.
Osa käytetyistä työkaluista ja laitteista
Bosch liimakynä. Liimapistooli. Boschin terminologian mukaan - liimapuikko. Loistava mobiiliratkaisu. Se toimii 18650 akulla, eli vaihdossa ei ole ongelmia jatkossa, eikä siellä ole enää mitään hajotettavaa. Se lämpenee nopeasti (15 sekuntia) ja on valmis toimimaan, sammuttamisen jälkeen lakkaa toimimasta lähes välittömästi - liimaa ei valu siitä kuten muista lämpöpistooleista. Löytyi sovellus jokapäiväiseen elämään ja käsityöhön. Ainoa negatiivinen asia ovat ei niin yleiset liimatangot: 7 mm, korkea lämpötila 150 ... 170 C (DREMEL GG01 ja GG03 tikut sopivat).

brutto 17718. Kuoritustyökalu (stripper). Täydellinen analogi tunnetulle mallille KBT WS-04A, jonka monet valmistajat lahjoittivat 1-in-1.

HT-202A. Työkalu johtojen puristamiseen liitinkoskettimilla (puristin).

Solomon SL-30. Luotettava juotosasema. Juotosraudan syöttöjännite 24V. Nikkelipinnoitettu kärki. Tarkka lämpötilan säätö.

SAIKE 8858. Se on myös Element 8032. Se on myös Yihua 8858. Se on myös ZHaoxin 858DH. Näissä malleissa on eroja, mutta toteutus, lämmittimet ja elektroniikka ovat samat. Hyvä, kätevä, halpa ja todella kompakti juotoskuivain. Ostin sen tuontisivustolta, ja myöhemmällä hiouksella halpaa kiinalaista teollisuutta: kaikki metallijätteet (!) ravisteltiin pois, juoksutteen pesu, koskettimien juottaminen levylle, tehotriakki laitettiin KPT8:aan. Vaikka tyytyväinen, hiustenkuivaaja on kuin hiustenkuivaaja, se puhaltaa, lämpötila ja puhallusnopeus ovat säädettävissä. Periaatteessa hiustenkuivaaja oikeuttaa rahansa. Suhteellisen tuore hankinta ja luotettavuustilastot ovat vielä epäselviä, mutta epäilen, että se kelpaa harvoin.

Metabo BZ 12SP. Erittäin vanha ruuvimeisseli. Harvinaisuus. Näitä ei varmaan ole enää myynnissä. Mahdollistaa melko hienotyöskentelyn hyvän keskityksen ja karan poiston vuoksi.

Velleman VTHD02. Mini pora. Tai kuten sitä kutsutaan myös - dremel (vaikka tämä on väärin samalla tavalla kuin kopiokoneita kutsutaan kopiokoneiksi). Kun sarja ostettiin promootiota varten, olin enemmän imarreltu suutinsarjasta kuin itse porasta. Se osoittautui kuitenkin varsin hyväksi ravitsemuksen tarkentamisen kanssa. Se toimii alkuperäisestä virtalähteestä, mutta kuormitettuna se on jotenkin vaikeaa hänelle. Noin kaksi vuotta sitten, tietysti, yksinomaan väliaikaisesti, tehtiin mobiilivirtalähde neljän 18650-pariston lokerosta säädettävällä teholla. Miniporasta tuli itsenäinen. Tällaisella teholla minipora alkoi tuntua paljon paremmalta ja osoittautui erittäin hyödylliseksi laitteeksi kotitaloudessa.


Noble NB4000P-4. Yleismittari. On kätevää, että johdot poistetaan kokonaan sisältä. Hankittu vaikeina opiskeluvuosina. Eli pitkäksi aikaa. Johdot katkesivat kauan sitten - minun piti "toimia" toisesta epäonnistuneesta yleismittarista. Nyt johdot ovat poissa. Akku ja sulake vaihdettu useita kertoja. Toimii toistaiseksi - hämmästyttävä luotettavuus keskinkertaisella tarkkuudella.

Fluke 179. Erittäin tarkka yleismittari. Laadukas, kätevä ja mikä tärkeintä tarkka työkalu.

Sai mainoksena. Vaikka… miksi ei – missä minun toimeksiantoni sitten on? Kaikki nämä työkalut ovat yleisiä tietoja. Löysin aikoinaan esimerkiksi irroittajia, jotka muuttavat johtojen irrotuksen rutiinista nautinnolliseksi, enkä kadu BOSCH GluePenin ostamista ollenkaan. Ehkä tämä pieni valikoima auttaa jotakuta.
Robotin kokoamiseen ei välttämättä tarvita monipuolista ja kallista työkalua, vaikka se varmasti parantaa työn laatua ja tuo siitä enemmän iloa. Riittää, että sinulla on tavallinen juotin, muutama ruuvimeisseli ja pora. Loppujen lopuksi tämän artikkelin kirjoittajalla, kauan sitten, oli vain pihdit, vasara, pari ruuvimeisseliä, kuparilanka, kannatin (vielä jossain!) ja kaksi poraa, puhelinjohtojen palasia ja paljon sininen sähköteippi (usein - käytetty), tämä riitti yksinkertaisen auton tekemiseen, joka painiketta painettaessa meni suoraan itsestään.
Pääkomponentit
Lukijoiden yleisen pyynnöstä tarjoan linkit (ebay / aliexpress) pääkomponentteihin. Linkit toimivat syyskuusta 2016 alkaen. Kaikki on tilattu puoli vuotta sitten (helmi-maaliskuu 2016), joten suosittelen katsomaan lisäksi - ehkä nyt voit ostaa paremmalla hinnalla.
Alusta, moottorit, pyörät, kiinnikkeet - alusta (valinta kahdesta väristä) + 4 * (pyörä 80 mm + kiinnikkeet + moottori (valinta kolmesta nopeudesta))
Kiinnitä huomiota seuraavaan sarjaan - 130 mm pyörä + kiinnikkeet + moottori Hall-anturilla
Kiinnitä huomiota tilaviin akkuihin (työskentelin niiden kanssa useita kertoja - näillä akuilla on yleensä sama todellinen ja ilmoitettu kapasiteetti, eli niissä on todella 3400 mAh!) - Panasonic NCR18650B 18650 / 3400mAh / 3,7V / suojaamaton moduuli Bluetooth HC-06 5
0.9% Se on kauheaa - missä on puhekulttuuri, lauseiden normaali rakentaminen ... kirjoittajan on opittava syntaksi ja morfologia! 2
5.9% Minun on vaikea vastata tai selittää kommenteissa. 12


